

|
为伺服系统选配乐动平台是一个复杂的过程,这个过程需要考虑力矩、轴的相对位移、硬度、转速、尺寸等要求。为了保证乐动平台的正常运转,这些要求必须非常匹配。在选用乐动平台之前,对这些乐动平台的性能和应用细节进行详细了解将非常有助于选择合适的乐动平台。不同的伺服连轴器存在着其自身的优缺点。本文旨在向伺服乐动平台的终端用户介绍不同乐动平台的性能,同时指出设计中要考虑的因素以及如何针对不同的应用情况选择合适的乐动平台。
1.十字滑块乐动平台
特点:平行纠偏能力最强
十字滑块乐动平台由两个毂和一个中心滑块组成。中心滑块是由塑料制造,特别情况下可由金属制造。中心滑块通过两边呈90°相对分布的卡槽和两侧的毂榫接在一起,从而传递力矩。中心滑块和毂间通过微小的压力吻合,这种结合能使乐动平台具有零背隙特性。
随着使用时间的增长,滑块可能会因磨损而失去零背隙特性,但中心滑块并不贵,也很容易更换,更换后仍能恢复其原有的性能。在使用过程中,中心滑块的滑动可调节轴的相对平行偏差。因为轴间的偏差只会导致滑块与毂之间产生摩擦力,因此它们之间的轴承负荷不会因偏差的增加而增大。与其它乐动平台不同, 十字滑块乐动平台不会产生附加弯矩,因而不会产生附加轴承载荷。
十字滑块乐动平台的性价比很高,并且有多种滑块材料可供用户选择,这是十字滑块乐动平台的一大优势。一些厂商也可以提供多种材料的滑块来满足各种应用的不同要求。一般来说有两类材质,一类材质适用于零背隙、高扭转刚度和大扭矩的应用,另一类材质适用于低精度定位、非零背隙、但有吸震和减噪要求的应用。非金属滑块还有电绝缘作用,可以充当机械保险丝。当塑料滑块损坏后,扭矩传递将被完全终止,从而保护贵重的机械零件。这种设计适用于大的平行偏差(从0.025到0.100英寸或更大,具体取决于乐动平台的尺寸)。
这种乐动平台仅能调节小于0.5°的相对角度偏差和小于0.005英寸的轴向位移,转速通常小于4000 转/分钟。角向偏差过大可使其失去等速特性。分体的三部分设计限制了它的轴向偏差调节能力,例如,它不适用于推拉式应用。同时,因为中心滑块是浮动的,两轴的运动必须保证滑块不会脱落。
2.梅花乐动平台
特点:吸收冲击最好的乐动平台
这种乐动平台一般有两种类型,一种是传统的直爪型,一种是曲面(内凹)爪型的零背隙乐动平台。传统的直爪型不适用于精度很高的伺服传动应用。
梅花乐动平台是在直爪型的基础上演变而来的,但不同的是其曲面爪设计能适用伺服系统应用。曲面是为了减少弹性梅花块的变形和限制高速运转时向心力对它的影响。
爪型乐动平台由两个金属毂和一个弹性块组成。梅花块有多个叶片分支,像十字滑块乐动平台一样,它也是通过压挤来使弹性块和两边的毂吻合的,由此保证了乐动平台的零背隙性能。与十字滑块乐动平台不同的是,它是通过压挤传递运动,而十字滑块乐动平台是通过剪力传递运动。
在使用梅花乐动平台时,使用者一定要注意扭矩不能超过弹性元件的******承受能力(保证零背隙的前提下),否则弹性元件将会被压扁变形失去弹性,这样弹性体上的预加载荷将会消失,从而致使乐动平台失去零背隙性能,还可能在发生严重问题后才被发现。
梅花乐动平台具有很好的平衡性能,适用于高转速应用(******可达40000 转/分钟), 但不能适用较大的偏差,尤其是轴向偏差。较大的平行偏差和角向偏差会产生比其他伺服乐动平台更大的附加轴承载荷。另一个值得关注的问题是梅花乐动平台的失效。一旦弹性梅花块损坏或失效,力矩传递并不会中断,两毂的金属爪将啮合在一起继续传递扭矩,这很可能会导致系统出现问题。根据实际应用选择合适的弹性梅花块材料是梅花乐动平台的一大优势,制造商可提供各种材料的弹性梅花块,通过不同的硬度和温度承受能力满足客户的实际应用要求。
3.膜片乐动平台
特点: 高扭转刚度,高速
膜片乐动平台至少由一组金属叠片(金属或合成树脂)和两个毂组成。金属叠片被销钉紧固在毂上,一般不会松动或引起盘和毂之间的反冲。有一些生产商可提供两组金属叠片的乐动平台,中间有一个刚性件,两边再连在毂上。
单膜片乐动平台和双膜片乐动平台的不同之处类似于单组螺旋切缝和多组螺旋切缝乐动平台之间的差别,单膜片乐动平台不适用于调节平行偏差,而双膜片乐动平台可以同时向不同的方向弯曲,所以可以承受平行偏差。
这种特点有点像波纹管乐动平台,实际上乐动平台传递力矩的方式差不多。金属叠片很薄,当偏差荷载产生时它很容易弯曲,因此可以承受高达5度的偏差,同时还能产生较低的轴承负荷。金属叠片具有很好的扭转刚度,仅稍逊于波纹管乐动平台。不利之处在于膜片乐动平台非常精巧,如果在使用中误用或没有正确安装则很容易损坏。所以保证安装偏差在乐动平台的正常运转承受范围之内是非常必要的。
4.刚性乐动平台
特点:安装轴对中要求高
顾名思义,刚性乐动平台是一种扭转刚度为刚性的乐动平台,即使承受负载时也无任何回转间隙。如果系统中有任何安装偏差,则会导致轴、轴承或乐动平台过早的损坏,也就是说刚性乐动平台无法用在高速的环境下,因为机器高速运转时轴上可能会产生高温,这种高温会导致轴的伸缩变形,而刚性乐动平台无法补偿由于轴的伸缩所造成的轴向尺寸偏差。当然,如果轴的轴向相对位移偏差能被成功地控制,在伺服系统中刚性乐动平台也会发挥很出色的性能。
尽管过去人们不赞成把刚性乐动平台用在伺服传动中,但由于它具有高扭矩承受力、刚性和零背隙等性能,在运动控制领域中越来越多的用户开始使用小规格的铝合金刚性乐动平台。
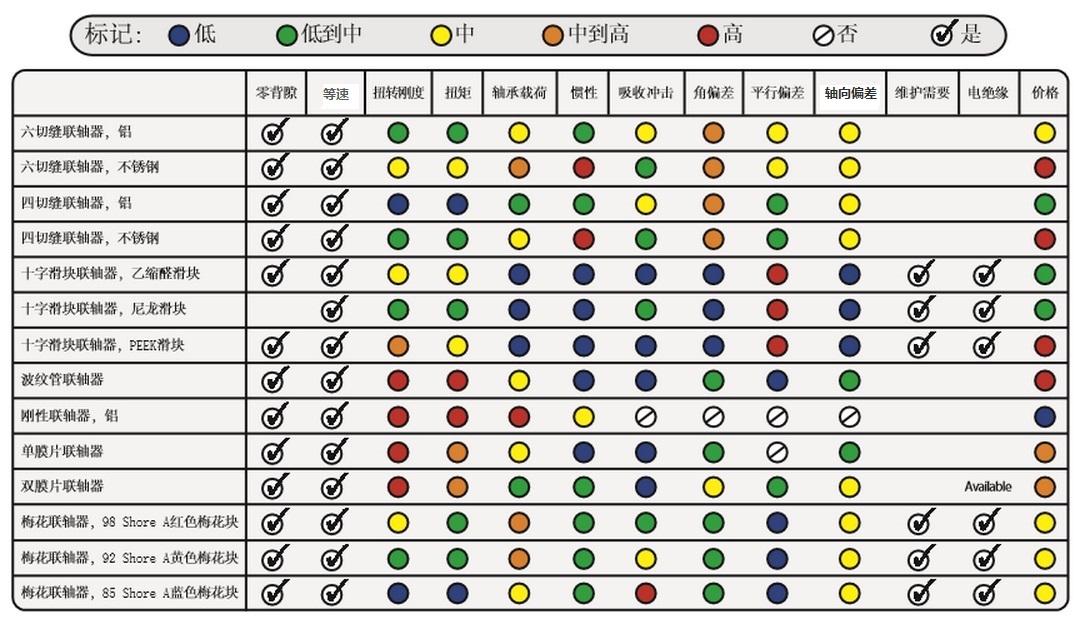
伺服乐动平台关键性能比较
结论
选择合适的伺服乐动平台是整个系统设计的重要组成部分,它会很大地影响到系统的整体性能。因此,在设计过程中应尽早地考虑乐动平台的选型,并分别把各种乐动平台和系统的功能目标排列对照,这样就可以避免运动控制应用中常见的各种问题。上述我们讨论的每种乐动平台都有其各自的特点,适用于各种不同的应用。目前,市场上存在各种类型的乐动平台,设计工程师可根据需要选择最合适的乐动平台,使系统性能最优且使用寿命最长。
|
行业新闻
如何正确选择伺服乐动平台
时间:18-09-26
行业新闻
如何正确选择伺服乐动平台
时间:18-09-26
|
为伺服系统选配乐动平台是一个复杂的过程,这个过程需要考虑力矩、轴的相对位移、硬度、转速、尺寸等要求。为了保证乐动平台的正常运转,这些要求必须非常匹配。在选用乐动平台之前,对这些乐动平台的性能和应用细节进行详细了解将非常有助于选择合适的乐动平台。不同的伺服连轴器存在着其自身的优缺点。本文旨在向伺服乐动平台的终端用户介绍不同乐动平台的性能,同时指出设计中要考虑的因素以及如何针对不同的应用情况选择合适的乐动平台。
1.十字滑块乐动平台
特点:平行纠偏能力最强
十字滑块乐动平台由两个毂和一个中心滑块组成。中心滑块是由塑料制造,特别情况下可由金属制造。中心滑块通过两边呈90°相对分布的卡槽和两侧的毂榫接在一起,从而传递力矩。中心滑块和毂间通过微小的压力吻合,这种结合能使乐动平台具有零背隙特性。
随着使用时间的增长,滑块可能会因磨损而失去零背隙特性,但中心滑块并不贵,也很容易更换,更换后仍能恢复其原有的性能。在使用过程中,中心滑块的滑动可调节轴的相对平行偏差。因为轴间的偏差只会导致滑块与毂之间产生摩擦力,因此它们之间的轴承负荷不会因偏差的增加而增大。与其它乐动平台不同, 十字滑块乐动平台不会产生附加弯矩,因而不会产生附加轴承载荷。
十字滑块乐动平台的性价比很高,并且有多种滑块材料可供用户选择,这是十字滑块乐动平台的一大优势。一些厂商也可以提供多种材料的滑块来满足各种应用的不同要求。一般来说有两类材质,一类材质适用于零背隙、高扭转刚度和大扭矩的应用,另一类材质适用于低精度定位、非零背隙、但有吸震和减噪要求的应用。非金属滑块还有电绝缘作用,可以充当机械保险丝。当塑料滑块损坏后,扭矩传递将被完全终止,从而保护贵重的机械零件。这种设计适用于大的平行偏差(从0.025到0.100英寸或更大,具体取决于乐动平台的尺寸)。
这种乐动平台仅能调节小于0.5°的相对角度偏差和小于0.005英寸的轴向位移,转速通常小于4000 转/分钟。角向偏差过大可使其失去等速特性。分体的三部分设计限制了它的轴向偏差调节能力,例如,它不适用于推拉式应用。同时,因为中心滑块是浮动的,两轴的运动必须保证滑块不会脱落。
2.梅花乐动平台
特点:吸收冲击最好的乐动平台
这种乐动平台一般有两种类型,一种是传统的直爪型,一种是曲面(内凹)爪型的零背隙乐动平台。传统的直爪型不适用于精度很高的伺服传动应用。
梅花乐动平台是在直爪型的基础上演变而来的,但不同的是其曲面爪设计能适用伺服系统应用。曲面是为了减少弹性梅花块的变形和限制高速运转时向心力对它的影响。
爪型乐动平台由两个金属毂和一个弹性块组成。梅花块有多个叶片分支,像十字滑块乐动平台一样,它也是通过压挤来使弹性块和两边的毂吻合的,由此保证了乐动平台的零背隙性能。与十字滑块乐动平台不同的是,它是通过压挤传递运动,而十字滑块乐动平台是通过剪力传递运动。
在使用梅花乐动平台时,使用者一定要注意扭矩不能超过弹性元件的******承受能力(保证零背隙的前提下),否则弹性元件将会被压扁变形失去弹性,这样弹性体上的预加载荷将会消失,从而致使乐动平台失去零背隙性能,还可能在发生严重问题后才被发现。
梅花乐动平台具有很好的平衡性能,适用于高转速应用(******可达40000 转/分钟), 但不能适用较大的偏差,尤其是轴向偏差。较大的平行偏差和角向偏差会产生比其他伺服乐动平台更大的附加轴承载荷。另一个值得关注的问题是梅花乐动平台的失效。一旦弹性梅花块损坏或失效,力矩传递并不会中断,两毂的金属爪将啮合在一起继续传递扭矩,这很可能会导致系统出现问题。根据实际应用选择合适的弹性梅花块材料是梅花乐动平台的一大优势,制造商可提供各种材料的弹性梅花块,通过不同的硬度和温度承受能力满足客户的实际应用要求。
3.膜片乐动平台
特点: 高扭转刚度,高速
膜片乐动平台至少由一组金属叠片(金属或合成树脂)和两个毂组成。金属叠片被销钉紧固在毂上,一般不会松动或引起盘和毂之间的反冲。有一些生产商可提供两组金属叠片的乐动平台,中间有一个刚性件,两边再连在毂上。
单膜片乐动平台和双膜片乐动平台的不同之处类似于单组螺旋切缝和多组螺旋切缝乐动平台之间的差别,单膜片乐动平台不适用于调节平行偏差,而双膜片乐动平台可以同时向不同的方向弯曲,所以可以承受平行偏差。
这种特点有点像波纹管乐动平台,实际上乐动平台传递力矩的方式差不多。金属叠片很薄,当偏差荷载产生时它很容易弯曲,因此可以承受高达5度的偏差,同时还能产生较低的轴承负荷。金属叠片具有很好的扭转刚度,仅稍逊于波纹管乐动平台。不利之处在于膜片乐动平台非常精巧,如果在使用中误用或没有正确安装则很容易损坏。所以保证安装偏差在乐动平台的正常运转承受范围之内是非常必要的。
4.刚性乐动平台
特点:安装轴对中要求高
顾名思义,刚性乐动平台是一种扭转刚度为刚性的乐动平台,即使承受负载时也无任何回转间隙。如果系统中有任何安装偏差,则会导致轴、轴承或乐动平台过早的损坏,也就是说刚性乐动平台无法用在高速的环境下,因为机器高速运转时轴上可能会产生高温,这种高温会导致轴的伸缩变形,而刚性乐动平台无法补偿由于轴的伸缩所造成的轴向尺寸偏差。当然,如果轴的轴向相对位移偏差能被成功地控制,在伺服系统中刚性乐动平台也会发挥很出色的性能。
尽管过去人们不赞成把刚性乐动平台用在伺服传动中,但由于它具有高扭矩承受力、刚性和零背隙等性能,在运动控制领域中越来越多的用户开始使用小规格的铝合金刚性乐动平台。
伺服乐动平台关键性能比较
结论
选择合适的伺服乐动平台是整个系统设计的重要组成部分,它会很大地影响到系统的整体性能。因此,在设计过程中应尽早地考虑乐动平台的选型,并分别把各种乐动平台和系统的功能目标排列对照,这样就可以避免运动控制应用中常见的各种问题。上述我们讨论的每种乐动平台都有其各自的特点,适用于各种不同的应用。目前,市场上存在各种类型的乐动平台,设计工程师可根据需要选择最合适的乐动平台,使系统性能最优且使用寿命最长。
|
乐动平台
© 海诚集团 版权所有 All rights reserved.
地址:江苏省镇江市高新技术开发园区68号 服务热线:18913433240
公司电话:0511-85783292 公司传真:0511-85019680(自动接收)
Copyright © 乐动平台 版权所有 苏ICP备14043855号-6